|
EXECELL - Experimental Evaluation of Advanced Sensor-Based Supervision and Work Cell Integration Strategies Robots currently used in industrial applications are located behind fences...
[Last edited
Nov 16, 2012
]
|
|
BABIR - A better audition for a better interaction with humanoid robot A robot has to offer an efficient and intuitive interaction with the user in order to be considered as an...
[Last edited
Nov 29, 2012
]
|
|
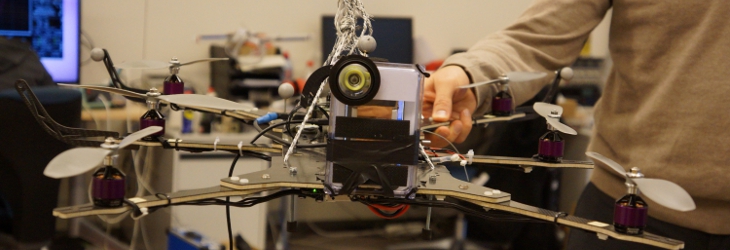
OMNIWORKS - Omnidirectional vision for human-UAV co-working OMNIWORKS involves 3 partners with widely experience in visual algorithms and control of Aerial Vehicles (UPM-CVG), developing...
[Last edited
Nov 26, 2013
]
|
|
REMAV - Remote eye for micro aerial vehicles The main goal of REMAV is to demonstrate the possibility to precisely and safely operate Micro Aerial Vehicles (small autonomous helicopters)...
[Last edited
Nov 5, 2013
]
|